Service hotline
+86 0755-83044319

release time:2022-03-03Author source:SlkorBrowse:11534
Introduction: Zhaoyi Innovation is a giant company of domestic MCU series products. In their series of MCU design solutions, they have extensive cooperation with SKLOR.
Using GD32F130 series MCU to design refrigerator compressor inverter board scheme
Refrigerator compressor inverter scheme overview
The frequency conversion board introduced in this article can be used for frequency conversion control of refrigerator compressors, and can also be used for frequency conversion control of range hoods and air conditioners. The scheme is based on GigaDevice's GD32F130 series MCU design. The MCU is equipped with Cortex-M3 core, which can realize PI control, SVPWM generator, and motor state observer by software; an advanced timer can directly generate 6 channels of complementary dead-zone adjustable PWM, The chip meets industrial-grade operating temperature and ESD, EMI standards, and is very suitable for PMSM, BLDC variable frequency speed control.
GD32F130 series MCU main specifications
Cortex-M3@48Mhz, 50 MIPS processing performance;
Flash: 64KB/32KB/16KB;
SRAM: 8KB/4KB/4KB;
High-speed high-precision ADC, 12Bits ADC x 1@2.6Msps, 10 channels;
Advanced timer x1, which can generate 6 complementary PWM outputs with adjustable dead time. general timer x6;
Flash with hardware encryption protection;
Various serial communication methods: I2C x2, SPI x2, UART x2;
Rich package types: TSSOP20/ QFN28/ QFN32/ LQFP32/ LQFP48/LQFP64
Industrial-grade operating temperature range: -40℃~+85℃;
Industrial grade ESD characteristics: 6000 Volt;
Main specifications and parameters of the inverter board
Rated output power 200W, 310V bus voltage, maximum working current 2A;
Magnetic field oriented method, sine wave current, sensorless start and control;
3 Resistor current sampling;
The inverter circuit is constructed by 6 Power MOSFETs;
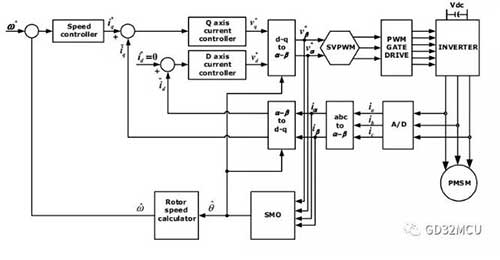
The control block diagram of the motor control system is as follows:
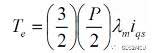
Implementation of MTPA
As shown in the system block diagram, the entire system is a double closed-loop control, the inner loop is a current control loop, and the outer loop is a speed control loop. Set the rotor magnetic flux direction as d-axis, q-axis is the orthogonal axis of d-axis, the control purpose of the current loop is to decouple the stator current and magnetic flux, and control the stator current to q -axis.
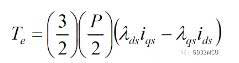
For the SPM motor, we set the target control value id of the d-axis to 0, and control all the current on the stator to the q-axis to obtain the Maximum Torque Per Ampere (MTPA). At this time, the torque and speed of the PMSM motor are only related to the current component of the q-axis. We then control the current on the d-axis through the speed control loop to achieve double closed-loop control.
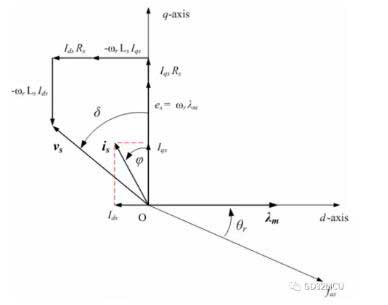
In actual work, since the structure of the SPM motor is not ideal, the actual current on the d-axis is not 0; at the same time, we will also purposefully control the current on the d-axis, so as to achieve the motor exceeding Base speed operation; at this time, we need to add a field weakening controller to the d-axis to ensure the realization of MTPA. The vector diagram when the SPM motor is running is as follows:
Implementation of FOC
There are a, b, c three-phase currents in the actual wiring of the PMSM motor. Now we need to connect the a, b, and c three-phase currents with the D axis current and the Q axis current. We need to use the two mathematical transformations of Clark and Park:
• Clark transformation: (a, b, c) → (α, β), α, β are two-phase orthogonal stationary coordinate systems;

•Park transformation: (α, β)→(D, Q), D, Q is a two-phase orthogonal rotating coordinate system, where θ is the rotor magnetic flux position;

Through the two mathematical changes of Clark and Park, we can decompose the a, b, and c three-phase currents of the PMSM motor into the D axis and the Q axis, thereby realizing Field Oriented Control (FOC). We can also find that the key point of the whole FOC control is to find the magnetic flux position θ of the rotor.
Implementation of SVPWM
We can also use the inverse Park transformation to convert the stator current from D, Q space to α, β space. After completing the magnetic field orientation, the last step of PMSM motor control is to generate PWM voltage acting on the three-phase terminals of the motor. According to the 8 switching states of the three-phase inverter, we can list the space vector modulation inverter state table:
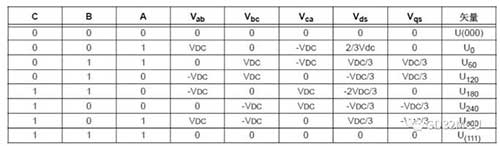
Among them, when the three phases of A, B, and C are all 0 and 1, it is an invalid state. We place these two state vectors at the origin of the space, and the remaining 6 vector states U0→U300 just draw a regular hexagon in the space. The traditional 6-step method to control the motor is to add these 6 voltage vectors to the stator end of the motor in turn.
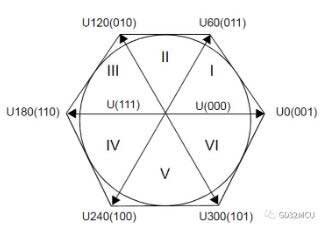
The purpose of space vector modulation (SVPWM) is to form a 360-degree equal-amplitude rotating voltage vector in the vector space, thereby reducing the current harmonic components output by the inverter and reducing torque ripple. The implementation method of SVPWM is to use two adjacent basic voltage vectors to synthesize the rotating voltage vector Uout in the vector space, and the maximum value of Uout is about 0.886*VDC. Taking the first quadrant as an example,
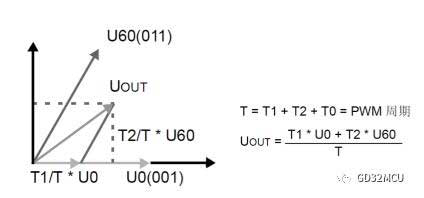
Among them, T1 is the action time of the voltage vector U0 in one PWM cycle, T2 is the action time of the voltage vector U60 in one PWM cycle, and T0 is the action time of the zero sequence component.
We first use the values of V_α and V_β to determine the sector sector, and then calculate the values of T1, T2 and T0 according to the trigonometric function and the value of Vdc.
A= V_β;
B= 1.7320508*V_α-V_β;
C= -1.7320508*V_α-V_β;
if(A>= 0) {a= 1;} else a= 0;
if(B>= 0) {b= 1;} else b= 0;
if(C>= 0) {c= 1;} else c= 0;
N=a+2*b+4*c;
switch(N)
{
case 1: sector = 2; break;
case 2: sector = 6; break;
case 3: sector = 1; break;
case 4: sector = 4; break;
case 5: sector = 3; break;
case 6: sector = 5; break;
default: break;
}
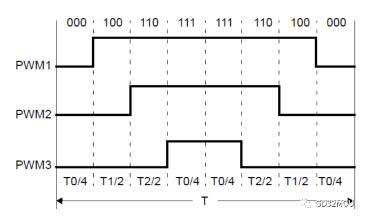
In order to reduce the switching times of MOSFETs in the inverter circuit, a 7-segment space vector synthesis method can be used, starting and ending with a zero vector (000) in each vector sector, with a zero vector (111) in the middle, and the rest of the time with valid vector. As shown below:
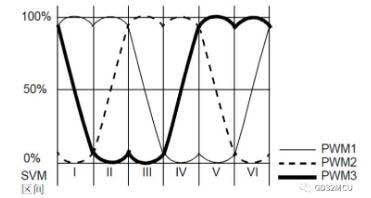
After the SVPWM voltage is applied to the three-phase terminals of the PMSM motor, the saddle-shaped phase voltage waveform can be seen, as shown in the following figure:
Implementation of the Rotor Angle Observer
Finding the position θ of the rotor magnetic flux is the key to the FOC algorithm, but in the process of high-speed rotation of the motor, the accuracy of the Hall sensor is not enough to accurately find the position θ of the rotor magnetic flux. In this case, a rotor angle observer is required. The angle information of the rotor magnetic flux can be obtained from the back EMF. We cannot directly measure the back EMF of the motor, but the value of the back EMF can be calculated by the observer method.
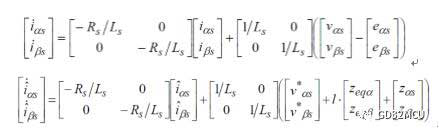
The error value between the observer current and the real current is chosen as the sliding mode control surface S,
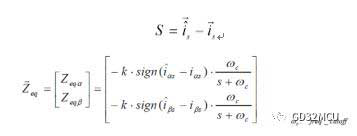
If the sliding mode gain K is large enough, we can find a sliding mode control surface S such that
The system block diagram of the sliding mode observer is as follows:
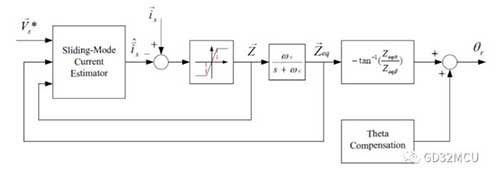
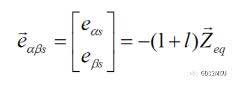
If we want to ensure the stability of the sliding mode control surface S, we need to select effective K and l values to ensure that
And the l value must be greater than -1. Finally, the angle θ of the rotor can be calculated by the arctangent function.
GD32F130 series MCU can easily implement the above-mentioned SVPWM generator, Park/Clark transformation, PI controller, and rotor position observer. The built-in high-speed and high-precision SAR ADC and multi-level interrupt system of the MCU can ensure the real-time performance of closed-loop control.
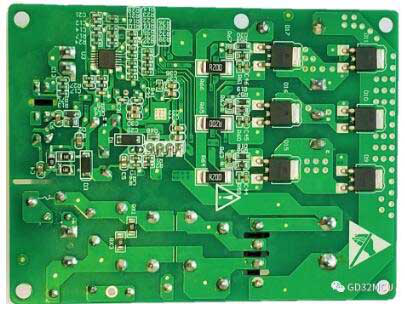
GD32F130 Refrigerator inverter board
front image

reverse image

Site Map | 萨科微 | 金航标 | Slkor | Kinghelm
RU | FR | DE | IT | ES | PT | JA | KO | AR | TR | TH | MS | VI | MG | FA | ZH-TW | HR | BG | SD| GD | SN | SM | PS | LB | KY | KU | HAW | CO | AM | UZ | TG | SU | ST | ML | KK | NY | ZU | YO | TE | TA | SO| PA| NE | MN | MI | LA | LO | KM | KN
| JW | IG | HMN | HA | EO | CEB | BS | BN | UR | HT | KA | EU | AZ | HY | YI |MK | IS | BE | CY | GA | SW | SV | AF | FA | TR | TH | MT | HU | GL | ET | NL | DA | CS | FI | EL | HI | NO | PL | RO | CA | TL | IW | LV | ID | LT | SR | SQ | SL | UK
Copyright ©2015-2025 Shenzhen Slkor Micro Semicon Co., Ltd
